Gallery¶
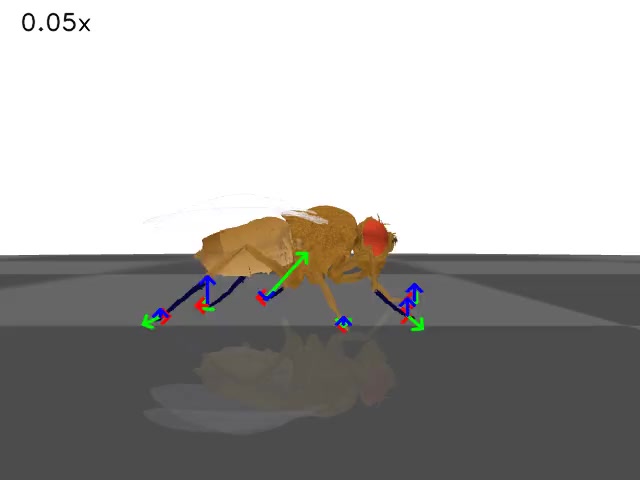
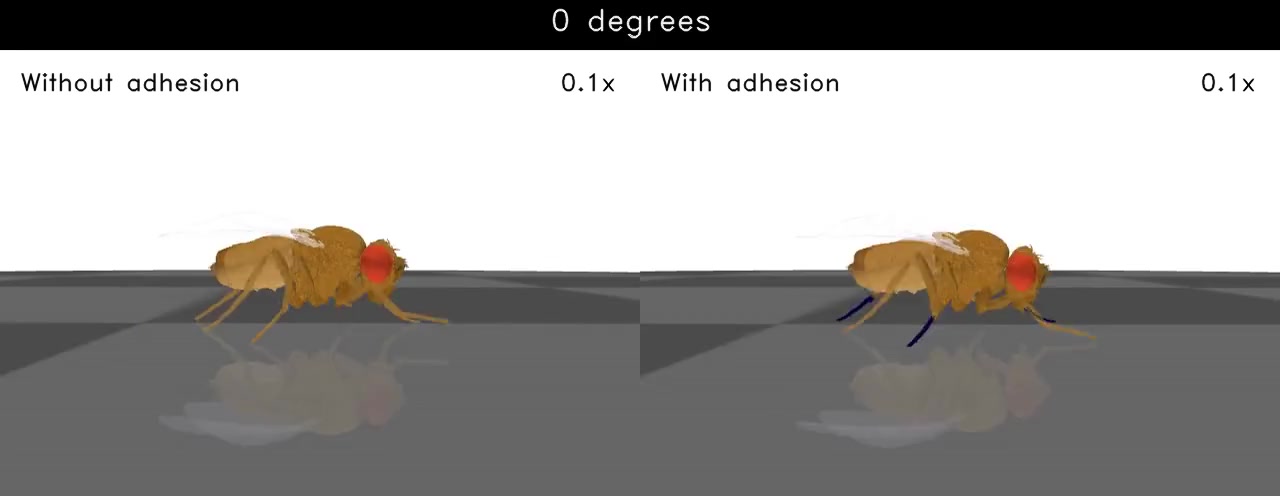
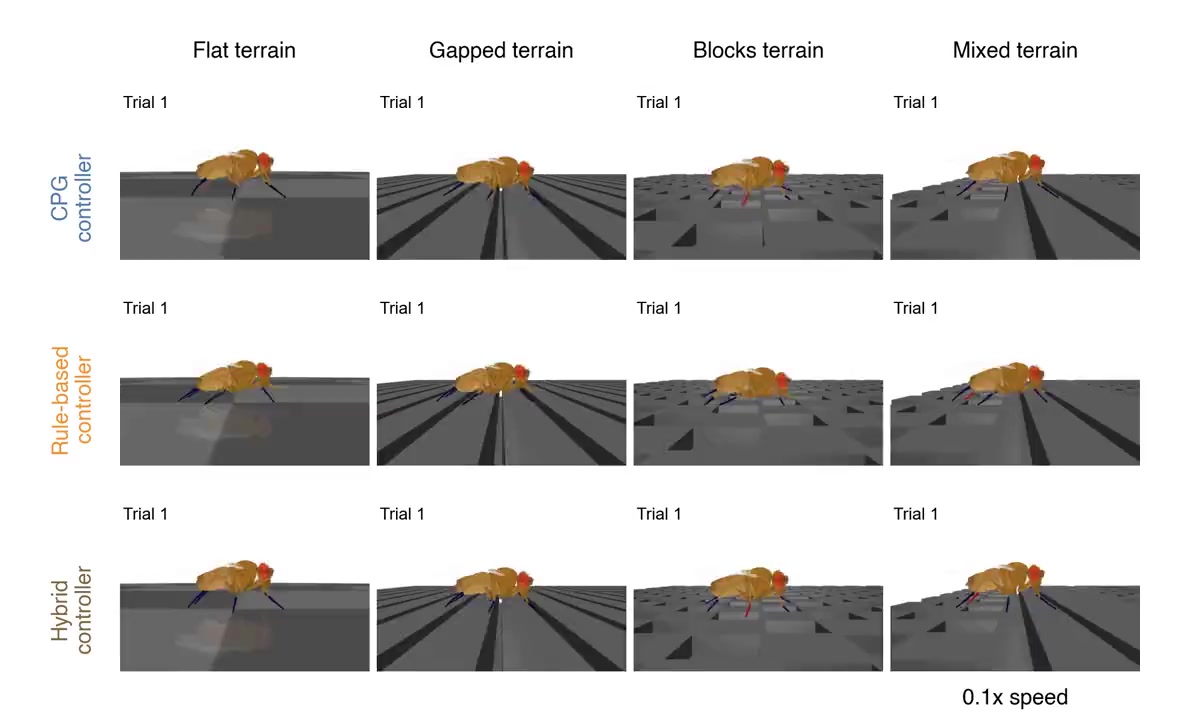
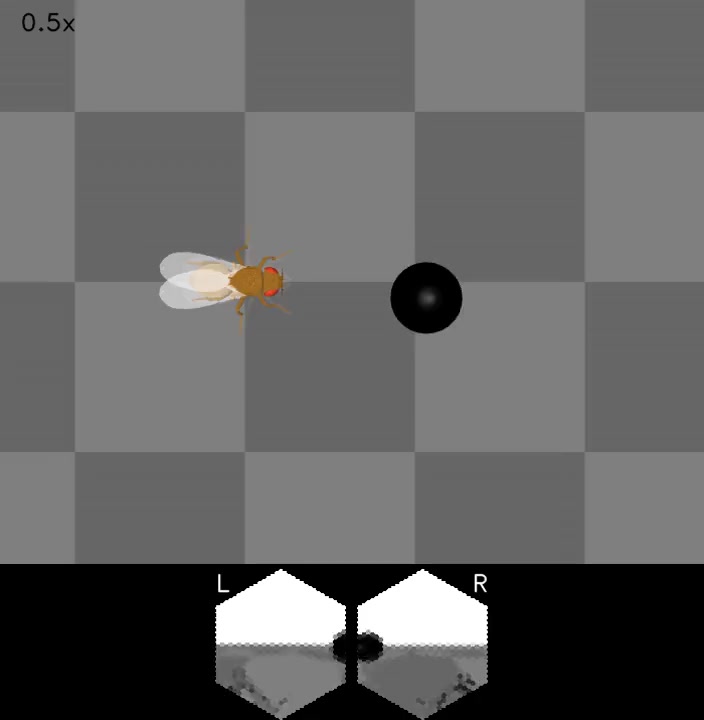
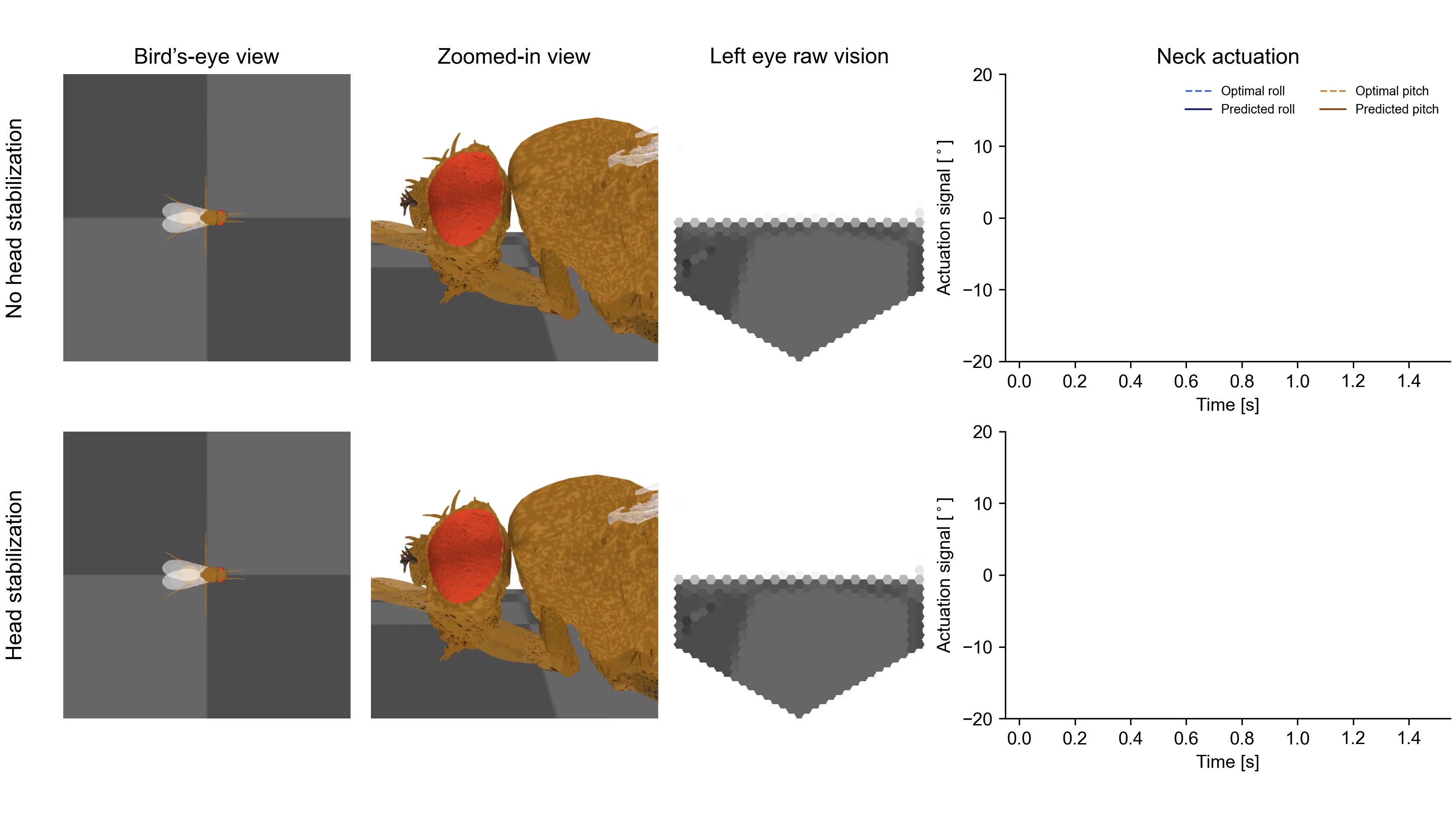
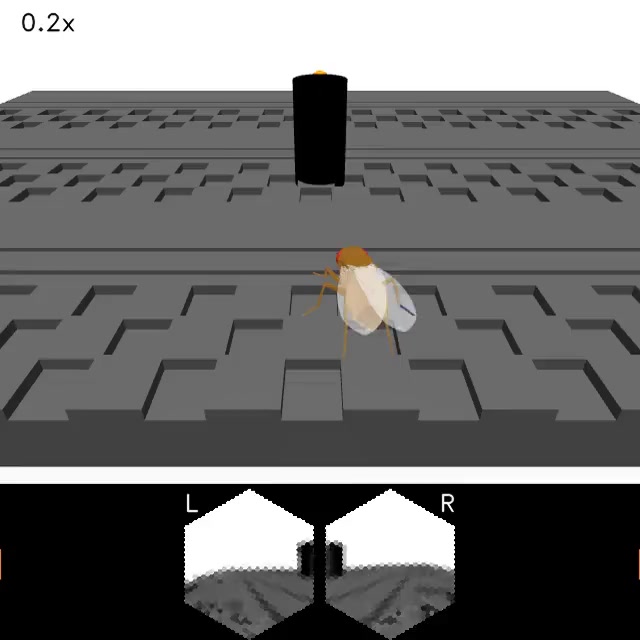
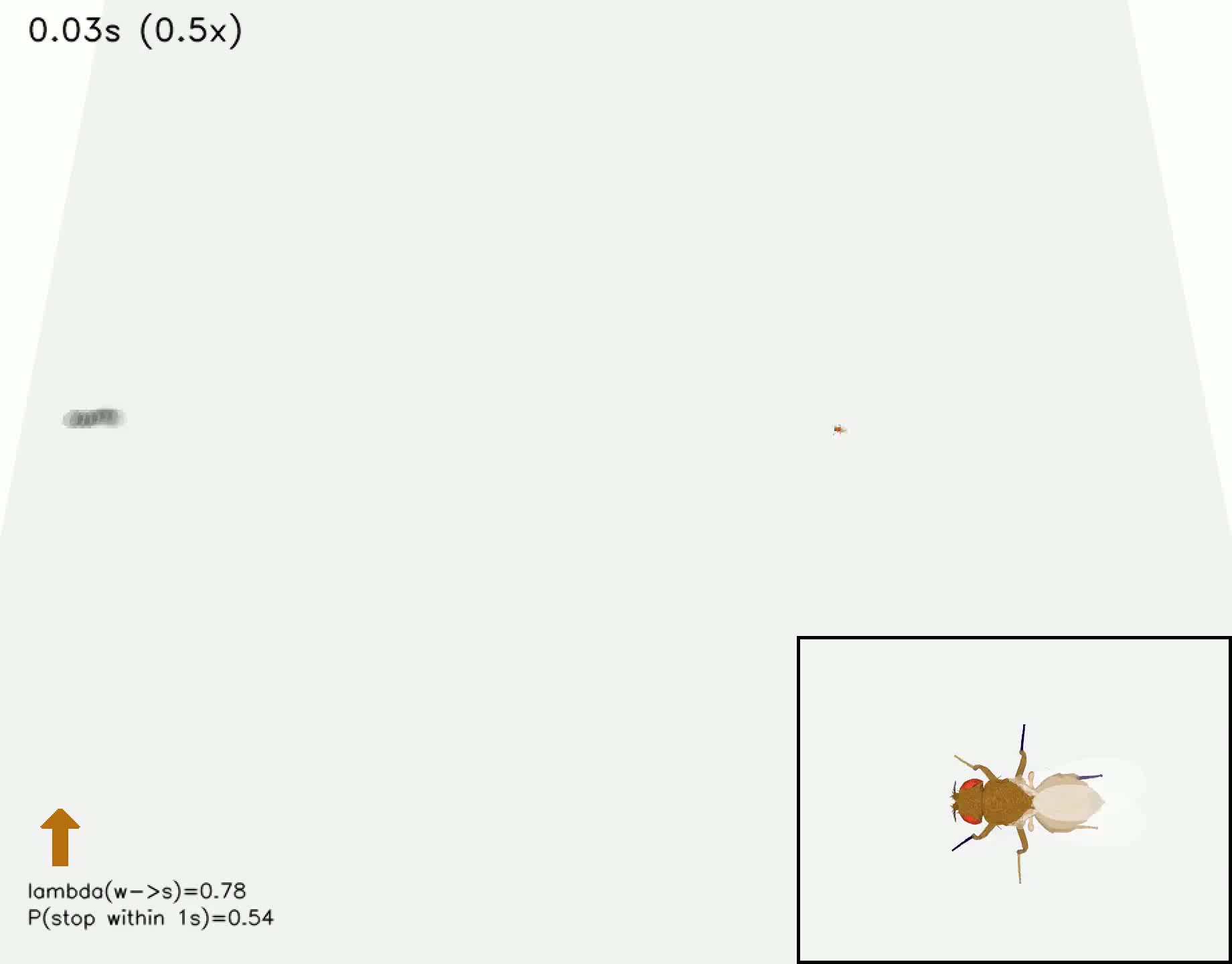
NeuroMechFly can be used to emulate a wide range of behaviours and scenarios. Here are some examples of the experiments that can be conducted using Flygym.
NeuroMechFly can be used to emulate a wide range of behaviours and scenarios. Here are some examples of the experiments that can be conducted using Flygym.