The NeuroMechFly Model¶
NeuroMechFly is a morphologically realistic neuromechanical model of the adult fruit fly Drosophila melanogaster based on a micro-CT scan of the animal. It was originally described in our NeuroMechFly paper and updated in our NeuroMechFly v2 paper. Please refer to these publications for more details.
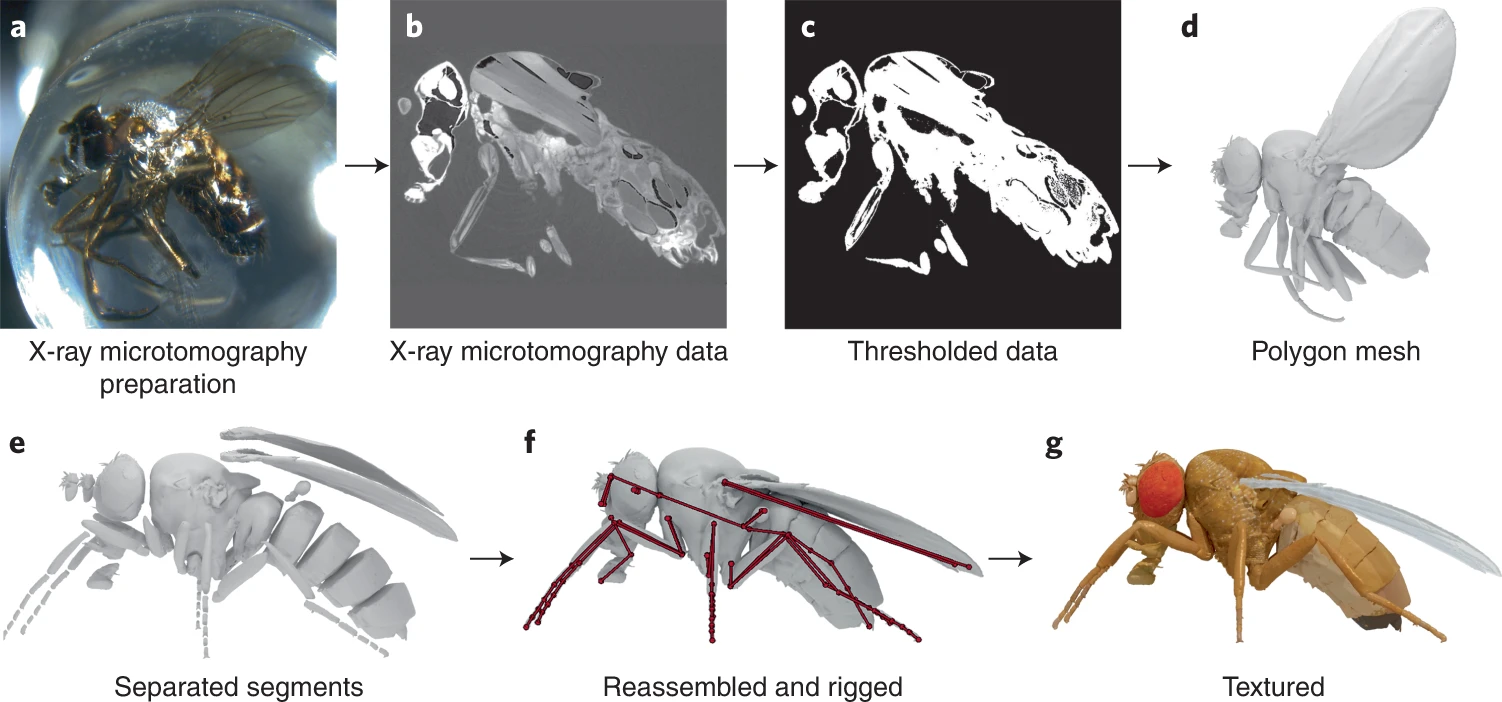
Figure from the NeuroMechFly paper (Lobato-Rios et al, Nature Methods 2022): a, An adult female fly encased in resin for X-ray microtomography. b, Cross-section of the resulting X-ray scan. Cuticle, muscles, nervous tissues and internal organs are visible. c, Thresholded data separating the foreground (white) from the background (black). d, 3D polygon mesh of the exoskeleton and wings. e, Articulated body parts after separation from one another. f, Body parts after reassembly into a natural resting pose and overlaid with a rigged skeleton in dark red. g, Fly model after the addition of texture.¶
Body Parts¶
The biomechanical model consists of a set of rigid body parts. The body parts relevant to locomotion are shown below:
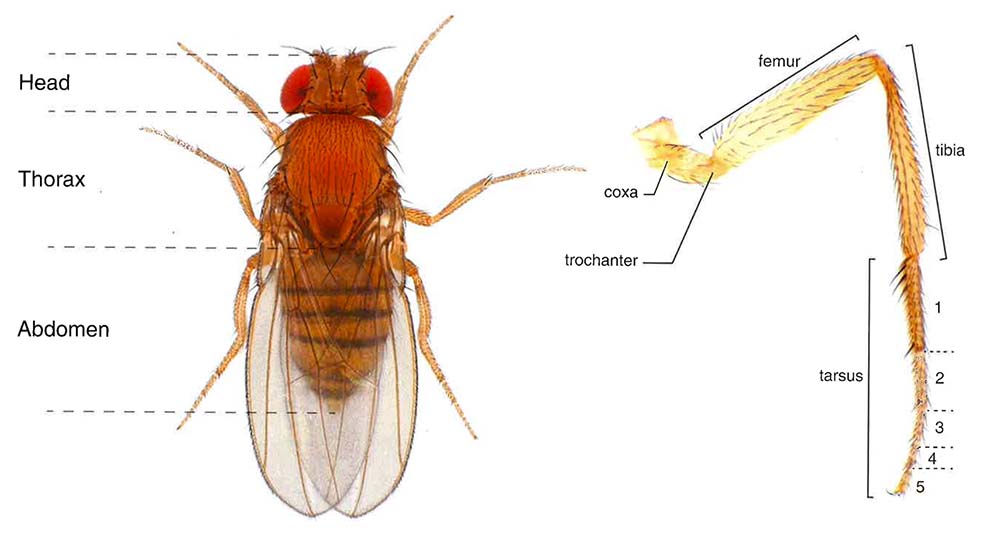
Source: Chyb, S., & Gompel, N. (2013). Atlas of Drosophila Morphology. doi:10.1016/c2009-0-61936-x¶
A “joint” links two body parts (see Joint Links). Note that in the physics simulation, a “joint” refers to a single degree of freedom (DoF). Therefore, if a (biological) joint has multiple DoFs (such as the thorax-coxa joint), the (biological) joint is implemented as multiple joint links. As a result, the same (biological) body segment is simulated with multiple body segments to create “virtual” links between different DoFs on the same joint. Any unlabelled link is a pitch DoF. Any link with a suffix of _roll is a roll DoF. Any link with a suffix of _yaw is a yaw DoF.
The following is a complete list of the body parts defined in the model (subject to update to enable more refined articulation or contact measurements). In general, L and R indicate the left and right side. F, M, H indicate the fore-, mid-, and hindlegs. An indicate the n-th segement of the abdomen. For example, RHFemur means the femur of the right hindleg; LFTarsus1 means the first tarsus link of the left foreleg, and A1A2 means the fused first and second segments of the abdomen.
['Thorax', 'A1A2', 'A3', 'A4', 'A5', 'A6', 'Head_roll', 'Head_yaw',
'Head', 'LEye', 'LPedicel_roll', 'LPedicel_yaw', 'LPedicel',
'LFuniculus_roll', 'LFuniculus_yaw', 'LFuniculus', 'LArista_roll',
'LArista_yaw', 'LArista', 'REye', 'Rostrum', 'Haustellum',
'RPedicel_roll', 'RPedicel_yaw', 'RPedicel', 'RFuniculus_roll',
'RFuniculus_yaw', 'RFuniculus', 'RArista_roll', 'RArista_yaw',
'RArista', 'LFCoxa_roll', 'LFCoxa_yaw', 'LFCoxa', 'LFFemur',
'LFFemur_roll', 'LFTibia', 'LFTarsus1', 'LFTarsus2', 'LFTarsus3',
'LFTarsus4', 'LFTarsus5', 'LHaltere_roll', 'LHaltere_yaw',
'LHaltere', 'LHCoxa_roll', 'LHCoxa_yaw', 'LHCoxa', 'LHFemur',
'LHFemur_roll', 'LHTibia', 'LHTarsus1', 'LHTarsus2', 'LHTarsus3',
'LHTarsus4', 'LHTarsus5', 'LMCoxa_roll', 'LMCoxa_yaw', 'LMCoxa',
'LMFemur', 'LMFemur_roll', 'LMTibia', 'LMTarsus1', 'LMTarsus2',
'LMTarsus3', 'LMTarsus4', 'LMTarsus5', 'LWing_roll', 'LWing_yaw',
'LWing', 'RFCoxa_roll', 'RFCoxa_yaw', 'RFCoxa', 'RFFemur',
'RFFemur_roll', 'RFTibia', 'RFTarsus1', 'RFTarsus2', 'RFTarsus3',
'RFTarsus4', 'RFTarsus5', 'RHaltere_roll', 'RHaltere_yaw',
'RHaltere', 'RHCoxa_roll', 'RHCoxa_yaw', 'RHCoxa', 'RHFemur',
'RHFemur_roll', 'RHTibia', 'RHTarsus1', 'RHTarsus2', 'RHTarsus3',
'RHTarsus4', 'RHTarsus5', 'RMCoxa_roll', 'RMCoxa_yaw', 'RMCoxa',
'RMFemur', 'RMFemur_roll', 'RMTibia', 'RMTarsus1', 'RMTarsus2',
'RMTarsus3', 'RMTarsus4', 'RMTarsus5', 'RWing_roll', 'RWing_yaw',
'RWing']
Joint Links¶
The following is a complete list of joint DoFs (subject to update to enable more refined articulations). See the Body Parts section for an explanation of the DoFs. In general, the joint name only lists the child link: for example, the thorax-coxa roll DoF is listed as joint_XXCoxa_roll.
['joint_Head_roll', 'joint_Head_yaw', 'joint_Head',
'joint_LPedicel_roll', 'joint_LPedicel_yaw', 'joint_LPedicel',
'joint_LFuniculus_roll', 'joint_LFuniculus_yaw',
'joint_LFuniculus', 'joint_LArista_roll', 'joint_LArista_yaw',
'joint_LArista', 'joint_RPedicel_roll', 'joint_RPedicel_yaw',
'joint_RPedicel', 'joint_RFuniculus_roll', 'joint_RFuniculus_yaw',
'joint_RFuniculus', 'joint_RArista_roll', 'joint_RArista_yaw',
'joint_RArista', 'joint_LFCoxa_roll', 'joint_LFCoxa_yaw',
'joint_LFCoxa', 'joint_LFFemur', 'joint_LFFemur_roll',
'joint_LFTibia', 'joint_LFTarsus1', 'joint_LFTarsus2',
'joint_LFTarsus3', 'joint_LFTarsus4', 'joint_LFTarsus5',
'joint_LHCoxa_roll', 'joint_LHCoxa_yaw', 'joint_LHCoxa',
'joint_LHFemur', 'joint_LHFemur_roll', 'joint_LHTibia',
'joint_LHTarsus1', 'joint_LHTarsus2', 'joint_LHTarsus3',
'joint_LHTarsus4', 'joint_LHTarsus5', 'joint_LMCoxa_roll',
'joint_LMCoxa_yaw', 'joint_LMCoxa', 'joint_LMFemur',
'joint_LMFemur_roll', 'joint_LMTibia', 'joint_LMTarsus1',
'joint_LMTarsus2', 'joint_LMTarsus3', 'joint_LMTarsus4',
'joint_LMTarsus5', 'joint_RFCoxa_roll', 'joint_RFCoxa_yaw',
'joint_RFCoxa', 'joint_RFFemur', 'joint_RFFemur_roll',
'joint_RFTibia', 'joint_RFTarsus1', 'joint_RFTarsus2',
'joint_RFTarsus3', 'joint_RFTarsus4', 'joint_RFTarsus5',
'joint_RHCoxa_roll', 'joint_RHCoxa_yaw', 'joint_RHCoxa',
'joint_RHFemur', 'joint_RHFemur_roll', 'joint_RHTibia',
'joint_RHTarsus1', 'joint_RHTarsus2', 'joint_RHTarsus3',
'joint_RHTarsus4', 'joint_RHTarsus5', 'joint_RMCoxa_roll',
'joint_RMCoxa_yaw', 'joint_RMCoxa', 'joint_RMFemur',
'joint_RMFemur_roll', 'joint_RMTibia', 'joint_RMTarsus1',
'joint_RMTarsus2', 'joint_RMTarsus3', 'joint_RMTarsus4',
'joint_RMTarsus5']

Zero pose of NeuroMechFly v2, including a front view (top left), a side view (top right), and a zoomed-in view of the left antennae (bottom left). The leg DoFs are also shown (bottom middle, bottom right). The global coordinate system’s x, y, and z axes are shown in red, green, and blue, respectively. Figure adapted from Lobato-Rios et al. (2022) and Wang-Chen et al. (2024).¶
The leg DoFs are the most critical to model terrestrial locomotion. In Drosophila, there are 7 actuated DoFs per leg: thorax-coxa pitch (joint_XXCoxa), thorax-coxa roll (joint_XXCoxa_roll), thorax-coxa yaw (joint_XXCoxa_yaw), coxa-femur pitch (joint_XXFemur), coxa-femur roll (joint_XXFemur_roll), femur-tibia pitch (joint_XXTibia), and tibia-tarsus pitch (joint_XXTarsus1). The links between tarsal segments can move passively but are not actively actuated. To get started, one might consider using a subset of all leg DoFs: for example, the NeuroMechFly paper used 3 DoFs per leg for locomotor optimization: thorax-coxa pitch for the forelegs, thorax-coxa roll for the mid- and hind-legs, coxa-femur pitch for all legs, and femur-tibia pitch for all legs.
Note
FlyGym provides hardcoded shorthands for these useful lists of links:
>>> import flygym
# all actuatable leg DoFs:
>>> flygym.preprogrammed.all_leg_dofs
['joint_LFCoxa', 'joint_LFCoxa_roll', 'joint_LFCoxa_yaw', 'joint_LFFemur', 'joint_LFFemur_roll', 'joint_LFTibia', 'joint_LFTarsus1', 'joint_LMCoxa', 'joint_LMCoxa_roll', 'joint_LMCoxa_yaw', 'joint_LMFemur', 'joint_LMFemur_roll', 'joint_LMTibia', 'joint_LMTarsus1', 'joint_LHCoxa', 'joint_LHCoxa_roll', 'joint_LHCoxa_yaw', 'joint_LHFemur', 'joint_LHFemur_roll', 'joint_LHTibia', 'joint_LHTarsus1', 'joint_RFCoxa', 'joint_RFCoxa_roll', 'joint_RFCoxa_yaw', 'joint_RFFemur', 'joint_RFFemur_roll', 'joint_RFTibia', 'joint_RFTarsus1', 'joint_RMCoxa', 'joint_RMCoxa_roll', 'joint_RMCoxa_yaw', 'joint_RMFemur', 'joint_RMFemur_roll', 'joint_RMTibia', 'joint_RMTarsus1', 'joint_RHCoxa', 'joint_RHCoxa_roll', 'joint_RHCoxa_yaw', 'joint_RHFemur', 'joint_RHFemur_roll', 'joint_RHTibia', 'joint_RHTarsus1']
# 3 DoFs per leg:
>>> flygym.preprogrammed.leg_dofs_3_per_leg
['joint_LFCoxa', 'joint_LFFemur', 'joint_LFTibia', 'joint_LMCoxa_roll', 'joint_LMFemur', 'joint_LMTibia', 'joint_LHCoxa_roll', 'joint_LHFemur', 'joint_LHTibia', 'joint_RFCoxa', 'joint_RFFemur', 'joint_RFTibia', 'joint_RMCoxa_roll', 'joint_RMFemur', 'joint_RMTibia', 'joint_RHCoxa_roll', 'joint_RHFemur', 'joint_RHTibia']
References¶
Lobato-Rios, V., Ramalingasetty, S. T., Özdil, P. G., Arreguit, J., Ijspeert, A. J., & Ramdya, P. (2022). NeuroMechFly, a neuromechanical model of adult Drosophila melanogaster. Nature Methods, 19(5), 620–627. https://doi.org/10.1038/s41592-022-01466-7
Wang-Chen, S., Stimpfling, V. A., Lam, T. K. C., Özdil, P. G., Genoud, L., Hurtak, F., & Ramdya, P. (2024). NeuroMechFly 2.0: simulating embodied sensorimotor control in adult Drosophila. Nature Methods, 21(12), 2353–2362. https://doi.org/10.1038/s41592-024-02497-y